




Order no.: MR-PICR7
METERDI Pipe Inspection Crawler Robot MR-PICR7
The METERDI Pipe Inspection Crawler Robot MR-PICR7 is a specialized machine designed for inspecting the inner lining of pipes. This robot works by navigating through narrow pipes and using sophisticated sensors and imaging technologies to gather information about the condition of the pipe’s interior.
Introducing the METERDI Pipe Inspection Crawler Robot MR-PICR7, a cutting-edge solution for efficient pipe inspection tasks. This advanced robot excels in navigating complex pipe systems with its versatile design and robust capabilities. Engineered for precision, the MR-PICR7 integrates state-of-the-art pipe crawler camera systems, ensuring thorough inspections with high-resolution imaging.
Ideal for sewer inspection projects, this robotic crawler adapts seamlessly to various pipe diameters and materials, enhancing operational flexibility. Its innovative features include a sturdy crawler crane mechanism, which supports stable movement and positioning within pipelines. The MR-PICR7 stands out among pipe inspection robots, leveraging technological advancements in legged robots for superior maneuverability and reliability.
Whether used in municipal pipe networks or industrial applications, this pipe inspection robot promises unparalleled performance. Designed to streamline pipe cleaning robot projects, it meets the demands of modern infrastructure maintenance with efficiency and accuracy. Trust METERDI’s PICR series for next-level solutions in robotic pipe inspection technology.
The METERDI Pipe Inspection Crawler Robot MR-PICR7 is a cutting-edge solution designed for comprehensive pipe inspections. This robotic crawler navigates through pipelines, using advanced sensors and a high-definition camera system to detect corrosion, leaks, cracks, and other structural issues. It provides real-time data and high-quality visuals, enabling quick and efficient assessment of pipeline conditions. Designed for versatility, the MR-PICR7 can operate in various pipe diameters and navigate bends, curves, and T-joints with ease.
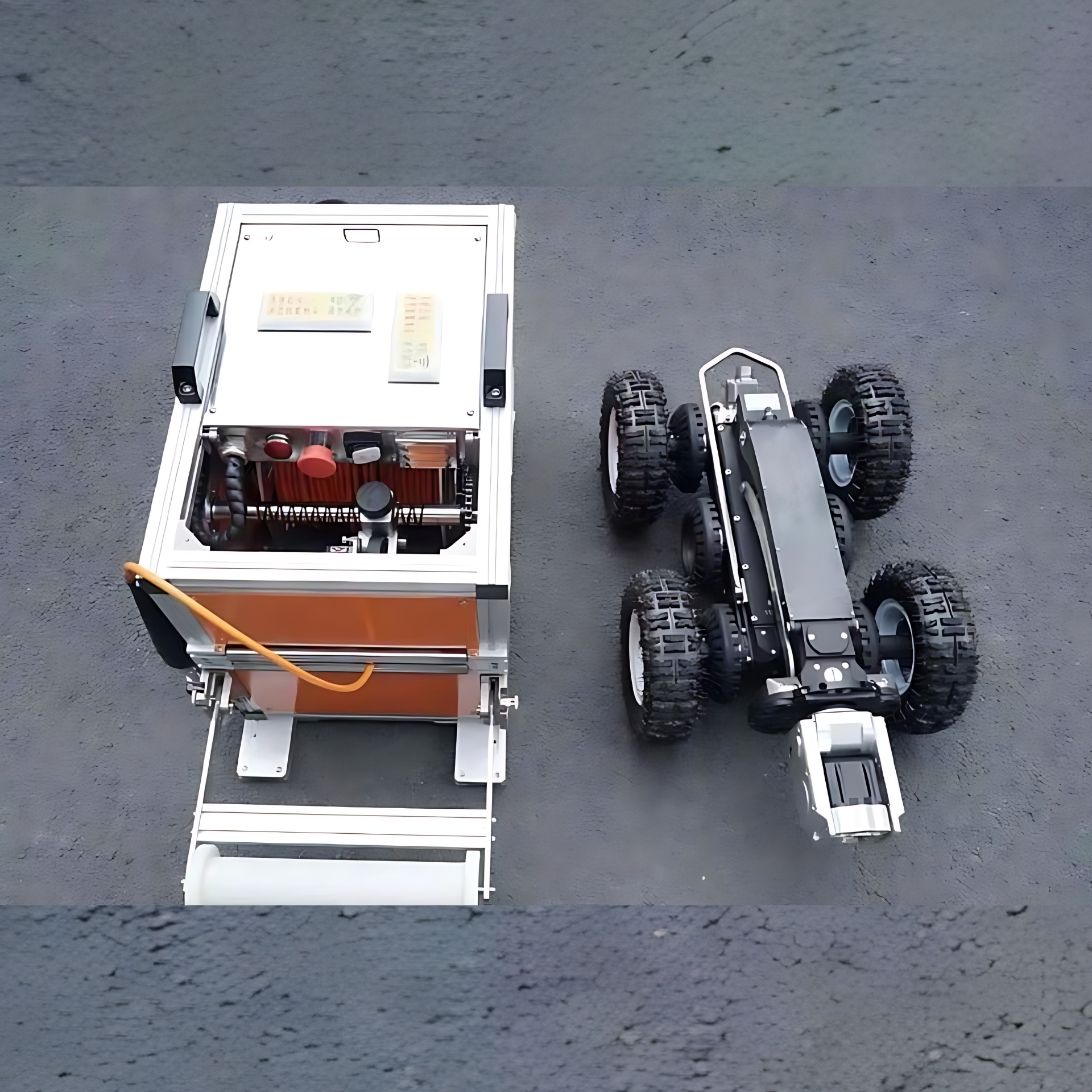
- Dimensions: 808x420x481mm (9-inch wheels, highest lifting frame) / 808x189x114mm (4-inch wheels, no lifting frame)
- Applicable Pipe Diameter: DN200-3000MM
- Protection Class: IP68 (waterproof, dustproof, explosion-proof)
- Camera Resolution: 2 million pixels, 1920×1080, 10x optical zoom
- Illumination: 4 high-bright LED near lights, 10 high-bright LED far lights
- Steering: Dual motor differential design, 360° in-site steering
- Drive: 6-wheel drive, imported motor
- Operating Temperature: -10~55°C
- Tire Options: 4″, 5″, 6″, 9″ standard; 8″, 10″ optional
- Cable Length: 120m standard, with 250kg tension
Applications
- Inspecting sewer pipelines for damage and blockages
- Assessing the condition of oil and gas pipelines
- Monitoring water supply pipelines for leaks and corrosion
- Evaluating industrial piping systems
- Conducting maintenance checks in hazardous or hard-to-reach areas
Highlights
- High-Definition Cameras: Equipped with 2 million pixel cameras for clear inspection visuals.
- Advanced Navigation: Dual motor design for 360° steering and obstacle navigation.
- Modular Design: Easy disassembly for quick setup and maintenance.
- Comprehensive Data: Real-time display of inspection data with detailed reporting.
- Versatile Application: Suitable for various pipeline diameters and environments.
- Rugged Construction: IP68 protection class ensures durability in harsh conditions.
- Extended Operation: Long battery life for uninterrupted inspections.
| Crawler |
Dimensions |
808*420*481mm(9-inch wheels, the highest position of the lifting frame) |
| 808*189*114mm(4-inch wheels, no the lifting frame) | ||
| Applicable Pipe Diameter | DN200-3000MM | |
| Protection Class | IP68, waterproof, dust proof, explosion-proof | |
| Lens Rotation | 360°axial rotation, 180°radial rotation | |
|
Camera Head |
2 million pixels
Resolution:1920*1080 10x optical zoom |
|
| Rear View Mirror Lens | 2 million pixels, resolution: 1920*1080 | |
| Near Light Illumination | 4pcs high bright LED cold white light source | |
| Far Light Illumination | 10pcs high brightness LED light source | |
| Tail Light Illumination | 2pcs high bright LED cold white light source | |
| Front Mount PT Camera | One-touch heating and defogging function, mirror scratching, anti-condensation | |
| Steering | Dual motor differential design, 360° in site steering | |
| Drive | 6-wheel drive; Imported motor drive | |
| Camera Lifting | Electric lifting frame can be directly connected to the crawler after being disassembled | |
| Operating Temperature | -10~55°C | |
| Tire | 4″, 5″, 6″ and 9″ are standard wheels, 8″ and 10″ are optional | |
| Communication | Robot and cable car communicate via 2-core cable | |
| Cable Car | Dimensions and Weight | 710*390*480mm, 41kg(without battery) |
| Data Communication | Cable cart to terminal via WIFI connection or cable connection | |
| Protection Class | IP65 | |
| Cable Length | Standard 120m | |
| Cable Tension | One-way 250kg | |
| Count Meter Function | 100m counting accuracy ±5mm | |
| Power Supply | Cable car power supply, over 8 hours battery life | |
|
Tablet Controller |
Man-robot Control Mode | Touch screen operation with the app, match up with the hand-grip controller |
| Memory Cards | 64G(Optional larger capacity available) | |
| Display Unit | Wireless + wired communication
HD display, professional eye protection mode Anti-glare, anti-reflective |
|
| Endurance Time | About 8H (the specific time depends on the use environment) | |
|
Hand-Grip Controller(Optional) |
Dimensions and Weight | 102*153*63mm handheld, 280g |
| Wireless Type | Bluetooth 6m (under normal conditions) | |
| Tablet Terminal Control Software | Information Display | Real-time display of date and time, crawler inclination (pipe slope), air pressure, distance counter (released cable length), inspection video, camera azimuth, lens height, anti-overturn alarm, air pressure alarm, customized text writing on video, calculate the pipe diameter, the slop curve, etc., detecting pipeline defects and generate reports according to relevant standards |
| Inspection Analysis | Pipe defects analysis; use controller to capture the defects images manually | |
| Control Function | It controls the forward, backward, steering, stop, speed of the crawler, automatic retracting cable, automated robot driving; lifting, lowering, lighting adjustment of the lens holder; horizontal, vertical rotation, and the center position returning of the lens ; focusing and zooming of camera; simultaneous display of front and rear camera, camera preset motion, defect length laser calibration, lens defogging, etc. |
- METERDI Pipe Inspection Crawler Robot MR-PICR7

